Winch


Requirement(s):
The winch shall spin fast enough to dispense line at the same rate it's being pulled in by the net-entangled RSO.
The winch motor shall provide enough torque to actuate the damping mechanism.
The winch shall not interfere with other subsystems.
Design Intent:
The gearing and motor torque are driven by the 6 rpm maximum of the RSO, the size of the RSO, and the spring force of the damping mechanism. This is a large mechanism that needs to be carefully fitted between the structural bars.
Implementation:
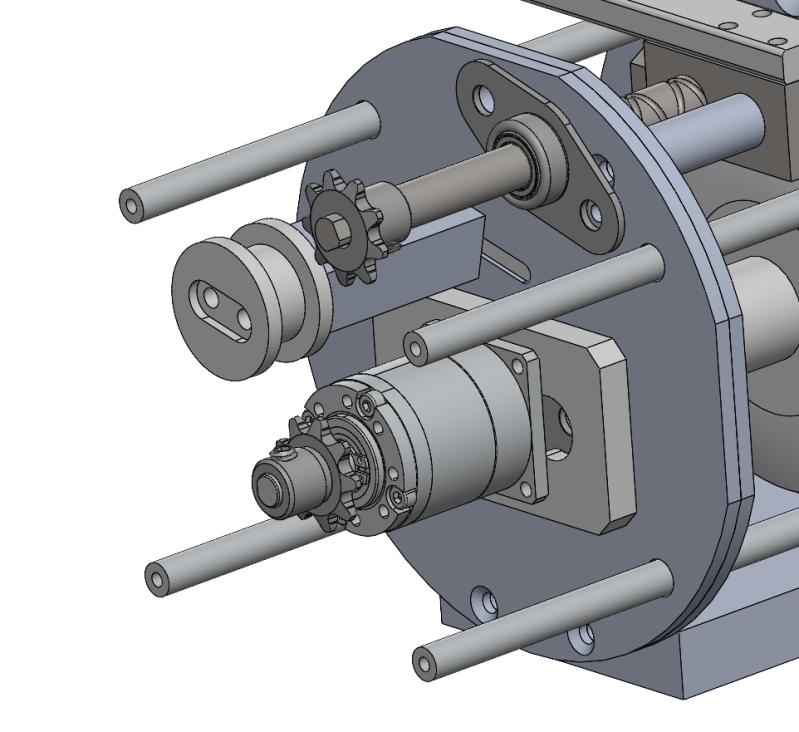
A NEMA 23 with a 5:1 COTS planetary gearbox provided the speed and torque necessary to meet these requirements. Miter gears and a machined bracket changed the motor location relative to the structure to avoid interference.

Requirement(s):
The winch line shall be sufficiently long to give the SV time to initiate the phase 4 thrust maneuver.
Design Intent:
The line diameter and spool width drive spool size.
Implementation:
A 1 mm diameter Kevlar line was selected to keep the spool size small, while maintaining the strength necessary to actuate the damping mechanism.
A spool was 3D printed. Overhangs made this part challenging. We considered splitting the spool into two parts, but stuck with a single part to avoid tangling with the seam. Tree supports got the job done.

Requirement(s):
The winch line shall not tangle.
Design Intent:
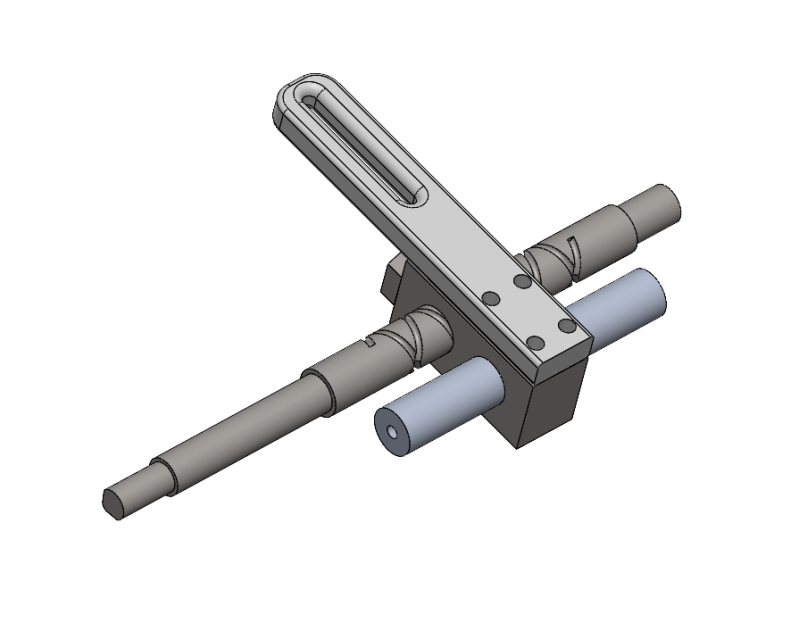
A reciprocating (self-reversing) screw can be used to ensure the winch winds evenly. The rotation speed of the screw will not be 1:1 with the spool, so a gear ratio will need to synchronize the two.
Implementation:
A line guide was 3D printed and designed to fit the COTS reciprocating block. A guide rod was cut and tapped to clock the reciprocating block.
In order to move at the right speed relative to the spool, the reciprocating screw was powered with another COTS planetary gearbox and a chain/sprocket drive. This chain drive featured a slot-mounted idler to allow for tension adjustments.
Requirement(s):
The winch shall be structurally sound.
The mechanisms supported by the winch structure shall not experience excess friction due to structural deflection.
The structure shall be manufacturable using 3-axis CNCs or waterjet.
Design Intent:
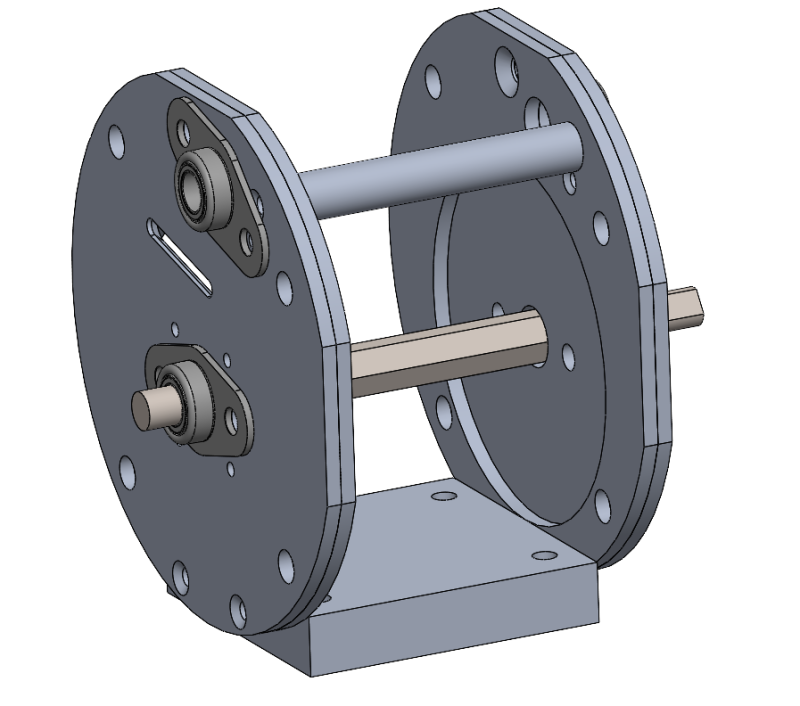
Both sides of the gearbox need to be connected securely together. Use plates, bars, and rods to adhere to manufacturing constraints.
Implementation:
A base plate attached the winch to the primary structure and held the gearbox side plates together. The clocking guide rod used by the reciprocating assembly aligned the side plates up top. All plates were cheap to manufacture.
Requirement(s):
The winch mechanisms shall be protected from foreign object debris (FOD)
The winch shall be safe from pinch hazards.
Design Intent:
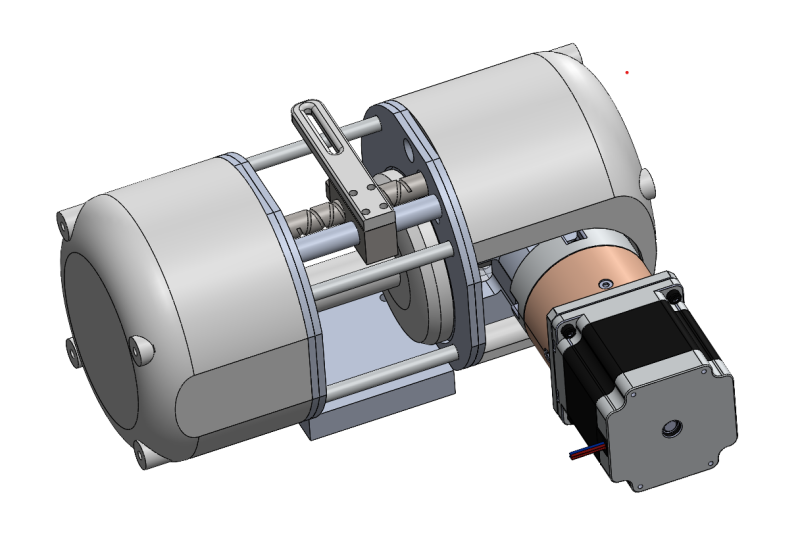
Dust covers should be incorporated to protect the mechanism from FOD and protect people from the mechanism.
Implementation:
Covers were 3D printed that slid onto tapped connecting rods. These were easy to pull off to adjust the mechanism.
Requirement(s):
The winch shall have a tension sensor to regulate the tension force.
Design Intent:
This seemed like a COTS requirement, but tension sensors are expensive. We needed to design our own.
Implementation:
We used a $30 load cell and a 3D printed housing to detect tension in the line. There was a bit of noise in our signal, but the data was stable enough to feed our PID loop and maintain zero tension when desired. This sensor was incredible, considering commercial sensors cost $3000+.

Flight Considerations
This winch functioned flawlessly for prototype testing, but there are many changes necessary to make this spaceworthy. The structure would need to be reworked, as our Earth-based prototype wouldn't hold up well in a vibration environment. A flightworthy design would also require a stiffer connection between both sides of the gearbox, as well as larger edge margins. Chains raise reliability concerns; replace with gears for space. Other changes would involve reducing size and mass, replacing polycarbonate components with a plastic that doesn't outgas, and implementing a custom reciprocating screw.

Overview
CU Boulder senior design capstone project sponsored by Sierra Space. My introduction to aerospace engineering.
2023–2024

Launcher
A spring-powered, simultaneous-release mechanism that shoots 6 weights. These weights are tethered to a net large enough for RSO capture. Safety was the primary concern for this subsystem.

Damping
A rotational braking clutch mechanism. As the tension force of the winch increases, rotational friction increases.